

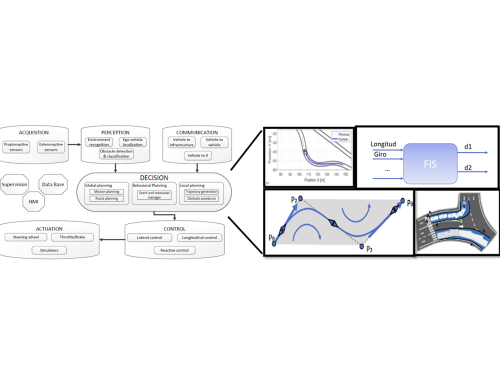
Gidatze automatizatua erronka konplexua da, eta kontrol-arkitektura definitzea funtsezkoa da bide horretan aurrera egitea ahalbidetuko duten irtenbide aurreratuak garatzeko. AutoEv@l proiektuan definitu den arkitekturan funtsezkoak diren bloke batzuk deskribatu dira aurreko berrietan. Pertzepzio-, kokapen- eta komunikazio-blokeei esker, ibilgailu automatizatuak gehiago jakin dezake bere inguruneaz, baita inguruan dituen agenteez ere. Erabaki-blokeak, bestalde, egin beharreko maniobra eta/edo egin beharreko ibilbide optimoa zehazteko aukera ematen du.
Hala ere, maniobra hori exekutatu ahal izateko, ibilgailuaren eta haren ingurunearen datuetan oinarrituta, beharrezkoa da kontrol-blokeari lotutako algoritmoak garatzea. Multzo honetan hainbat kontrolagailu mota aurki ditzakegu, eta horiek hainbat parametro ebaluatuko dituzte, hala nola ibilgailuen arteko distantzia, ibilbidearen jarraipen errorea, ibilgailuaren aldagai dinamikoak edo inguruneko baldintzak, aukeratutako maniobra behar bezala egin dadin.
Kontrol-algoritmoek batez ere ibilgailuaren eta bidaiarien segurtasuna bermatu behar dute, baina beraien erosotasuna ahaztu gabe. Bi zehaztapen horiek kontrajarri ere egin daitezke, adibidez, arriskugarritasun handiko egoera batean azkar balaztatu behar bada (adibidez, talka saihesteko) maniobra hori ez da batere erosoa izango bidaiarientzat. Hala ere, badira beste egoera asko, seguruak direnak baina erosotasunari dagokionez oso desberdinak.
UPV/EHUn ezagutza zabala dago kontrolatzaile aurreratuen esparruan. Izan ere, hauek hainbat helburu konbinatzeko aukera ematen dute, baita itxuraz kontraesankorrak diren helburuak ere. AutoEv@l proiektuaren esparruan, UPV/EHUko ikertzaileek aktiboki kolaboratzen dute algoritmo horiek proiektuan proposatutako azterketa-kasuetara egokitzeko.
Eremu honetan definitutako proposamenetako bat Ereduan Oinarritutako Kontrolagailu Prediktiboak erabiltzea da. Horiek ibilgailu automatizatuaren eredu sinplifikatua erabiltzen dute etorkizuneko portaera iragartzeko eta horren arabera jarduteko. Optimizazioan oinarritutako algoritmo horien definizioari esker, erosotasunari, segurtasunari eta energia-eraginkortasunari lotutako helburuak sar daitezke. Horrek, kontrolaren lehentasunak modu dinamikoan banatzea ahalbidetzen duten algoritmo berriekin konbinatuta, kontrolatzailea hainbat egoeratara egokitu ahal izatea ahalbidetzen du, segurtasunari pisu handiagoa emanez arrisku-egoera bat hautematen denean (errepidean gelditutako auto bat, esaterako), edo erosotasunari pisu handiagoa emanez baldintza nominaletan (aurreratze batean adibidez).

Horretaz gain, AutoEv@l-en esparruan, gidatze eroso bat markatzen duten kontrol-ekintzak zehaztu ahal izateko, UPV/EHUk, Automotive Intelligent Center-arekin lankidetzan, gidatze-estiloak bidaiarien erosotasunean duen eragina aztertzen du, aurreko berrietan zehaztu den bezala. Informazio hau ezinbestekoa da kontrolatzaileak behar bezala sintonizatzeko eta gure gizartean gidatze automatizatua orokortzeko.



.svg")
{kind=link}
{kind=link}
{kind=link}
{kind=link}